Control interface for hands-free navigation of personal mobility vehicles
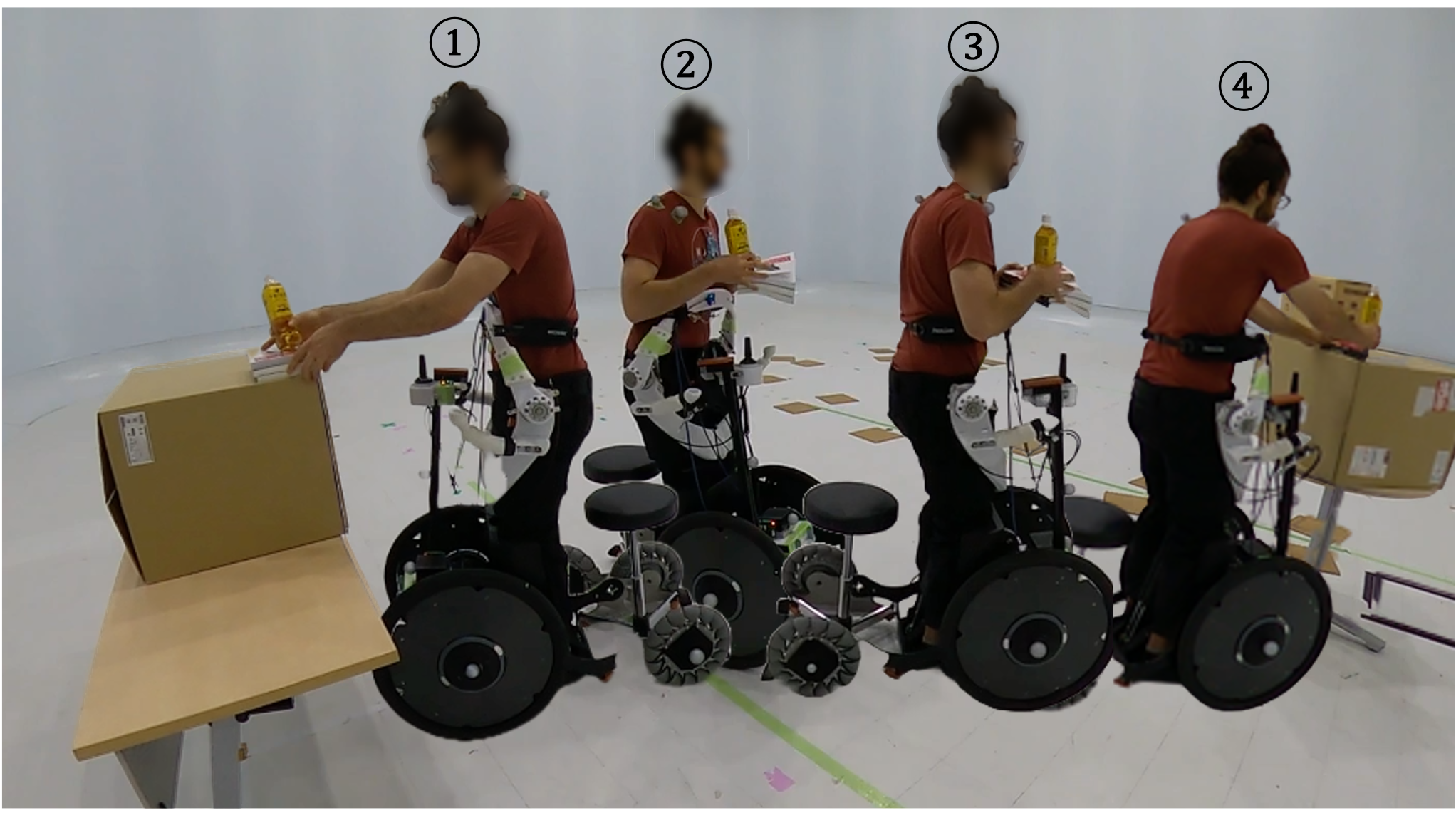
The user is controlling the device while holding an object in hand.
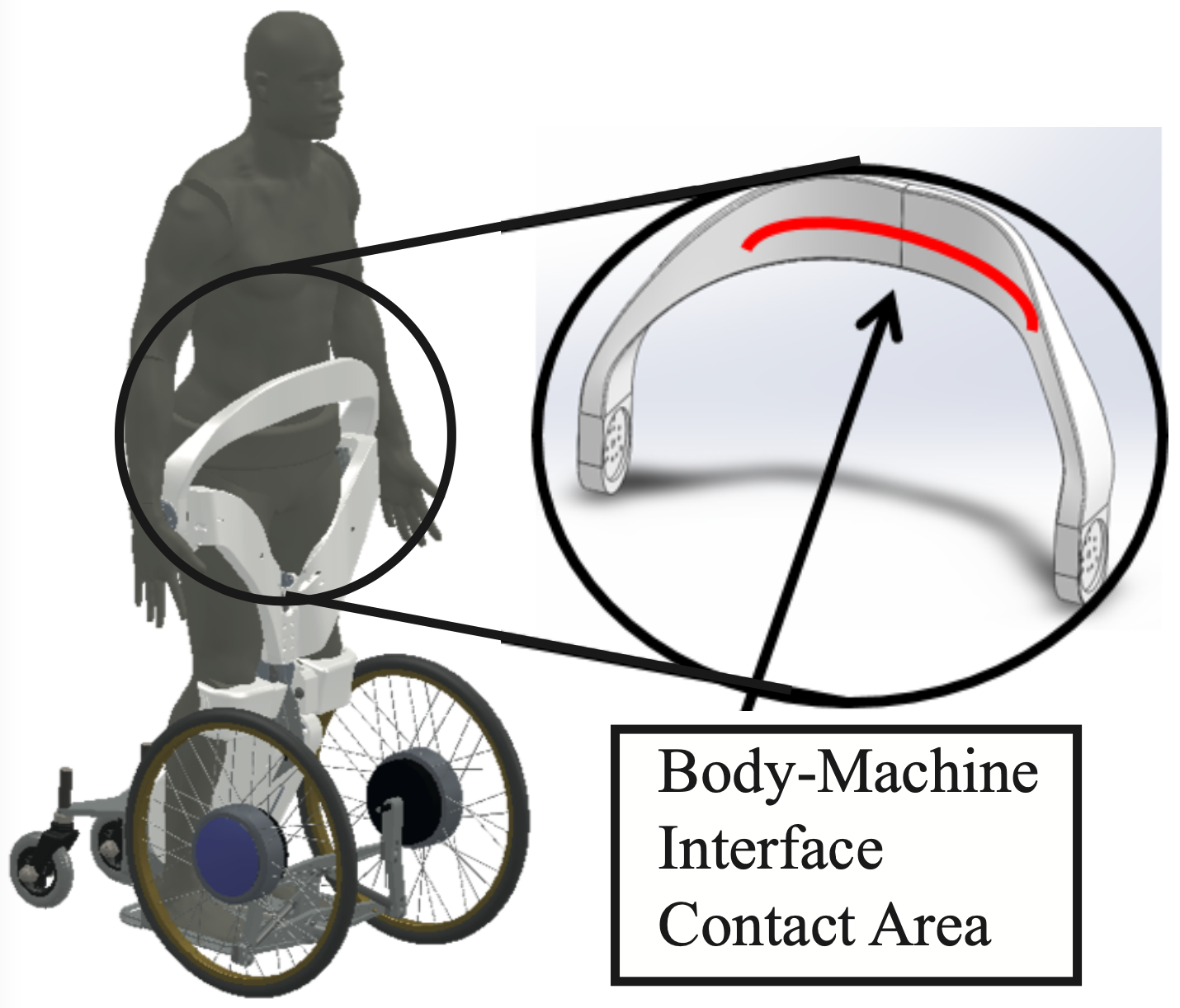
I developed a torso control interface which enables hands-free control with user’s natural upper-body movement for personal mobility devices. I built a support bar which was installed in front of the user’s waist level, the bar consists of both solid segment and soft segment. An array of force sensors was attached on the inner surface of the bar for detecting the pressure distribution of the human body. One IMU sensor was attached on the bar for detecting the bending angle of the user. An algorithm was developed for estimating the driving intention through pressure distribution and bending angle. A calibration algorithm was developed for different users. Different experiments have been conducted to verify the effectiveness of proposed torso control system. The basic methodology and validation of the proposed system was presented in (Chen et al., 2019; Chen et al., 2020), a recent version was presented in (Chen et al., 2022), a complete description of the methodolody and validation of the improved torso control system was presented in ICRA 2024 and accepted by IEEE/ASME Transactions on Mechatronics (Chen et al., 2024; Chen et al., 2024).
Keywords: Hands-free control, intention estimation, human-robot interface. Skills:: Python, ROS, 3D modeling (Solidworks), dynamics, Kalman filter, Eagle, user study
Reference
Torso Control System with A Sensory Safety Bar for a Standing Mobility Device
Yang Chen, Diego Paez-Granados, and Kenji Suzuki
2019 International Symposium on Micro-NanoMechatronics and Human Science (MHS) 2019
@inproceedings{torsoMHS,author={Chen, Yang and Paez-Granados, Diego and Suzuki, Kenji},booktitle={2019 International Symposium on Micro-NanoMechatronics and Human Science (MHS)},title={Torso Control System with A Sensory Safety Bar for a Standing Mobility Device},year={2019},volume={},number={},pages={1-5},doi={10.1109/MHS48134.2019.9249303}}
Control Interface for Hands-free Navigation of Standing Mobility Vehicles based on Upper-Body Natural Movements
Yang Chen, Diego Paez-Granados, Hideki Kadone, and 1 more author
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
@inproceedings{torsoIROS,author={Chen, Yang and Paez-Granados, Diego and Kadone, Hideki and Suzuki, Kenji},booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},series={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Control Interface for Hands-free Navigation of Standing Mobility Vehicles based on Upper-Body Natural Movements},year={2020},volume={},number={},pages={11322-11329},doi={10.1109/IROS45743.2020.9340875},publisher={Vision},}
Torso Control Interface with Compliant Coupling for Assistive Mobility Devices
Yang Chen, Modar Hassan, Diego F. Paez-Granados, and 3 more authors
Humanoids 2022 Workshop on "the Advances in Close Proximity Human-Robot Collaboration" 2022
@inproceedings{torso_humanoids,author={Chen, Yang and Hassan, Modar and Paez-Granados, Diego F. and Eguchi, Yosuge and Benallegue, Mehdi and Suzuki, Kenji},booktitle={Humanoids 2022 Workshop on "the Advances in Close Proximity Human-Robot Collaboration"},title={Torso Control Interface with Compliant Coupling for Assistive Mobility Devices},year={2022},volume={},number={},pages={},}
Torso-based Control Interface with Compliant Coupling for Standing Mobility Devices
Yang Chen, Diego F. Paez-Granados, Modar Hassan, and 1 more author
ICRA 2024 Workshop on "Assistive Systems: Lab to Patient Care" 2024
@article{torsoicra2024,author={Chen, Yang and Paez-Granados, Diego F. and Hassan, Modar and Suzuki, Kenji},journal={ICRA 2024 Workshop on "Assistive Systems: Lab to Patient Care"},title={Torso-based Control Interface with Compliant Coupling for Standing Mobility Devices},year={2024},volume={},number={},pages={},doi={},url={https://youtu.be/98Gdor5sYJs},}
Torso-Based Control Interface for Standing Mobility-Assistive Devices
Yang Chen, Diego F. Paez-Granados, Modar Hassan, and 1 more author
@article{torsotmech,author={Chen, Yang and Paez-Granados, Diego F. and Hassan, Modar and Suzuki, Kenji},journal={IEEE/ASME Transactions on Mechatronics},title={Torso-Based Control Interface for Standing Mobility-Assistive Devices},year={2024},volume={},number={},pages={},doi={},}


 Torso Control System with A Sensory Safety Bar for a Standing Mobility Device2019 International Symposium on Micro-NanoMechatronics and Human Science (MHS) 2019
Torso Control System with A Sensory Safety Bar for a Standing Mobility Device2019 International Symposium on Micro-NanoMechatronics and Human Science (MHS) 2019