autonomous docking
Virtual Landmark-Based Control of Docking Support for Assistive Mobility Devices

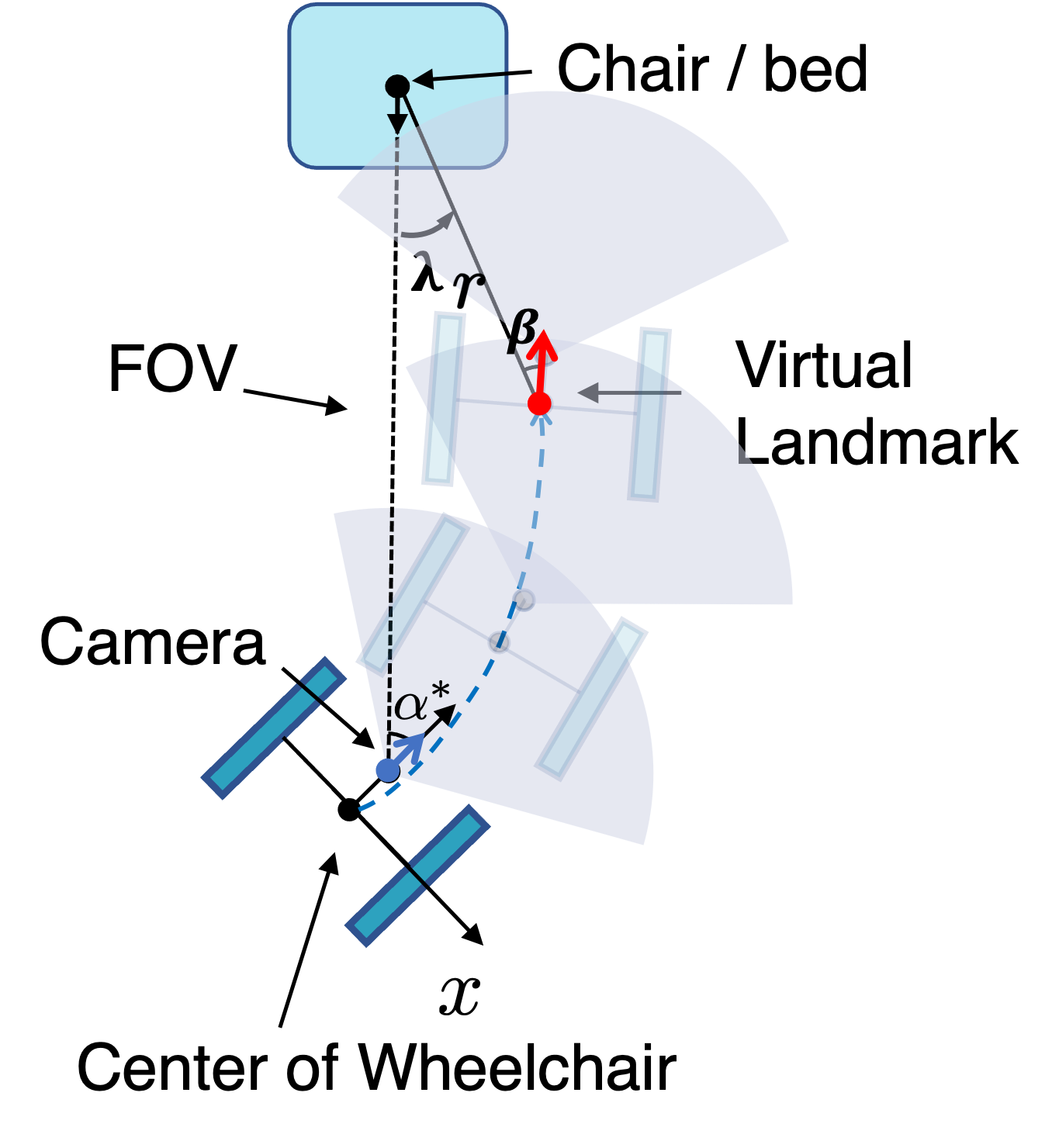
This works (Chen et al., 2021) proposes an autonomous docking support approach for assistive mobility devices like intelligent wheelchairs to assists the user in approaching a rest surface, such as a chair or bed. A virtual landmark estimation method was proposed to extract the target pose from a chair through point cloud processing without any additional landmark. A stable nonlinear feedback controller is designed for the pose alignment task under the constraint of camera’s field of view (FOV). The effectiveness of the proposed system was demonstrated with a real-time implementation on a standing mobility vehicle.
Keywords: virtual landmark estimation, nonlinear controller, stability
Skills: Python, C++, ROS, kinematics, MATLAB, PCL